应对各类环境的数字化需求
可在任何地点、任何条件下捕获精准数据,无需依赖GPS等外部基础设施。
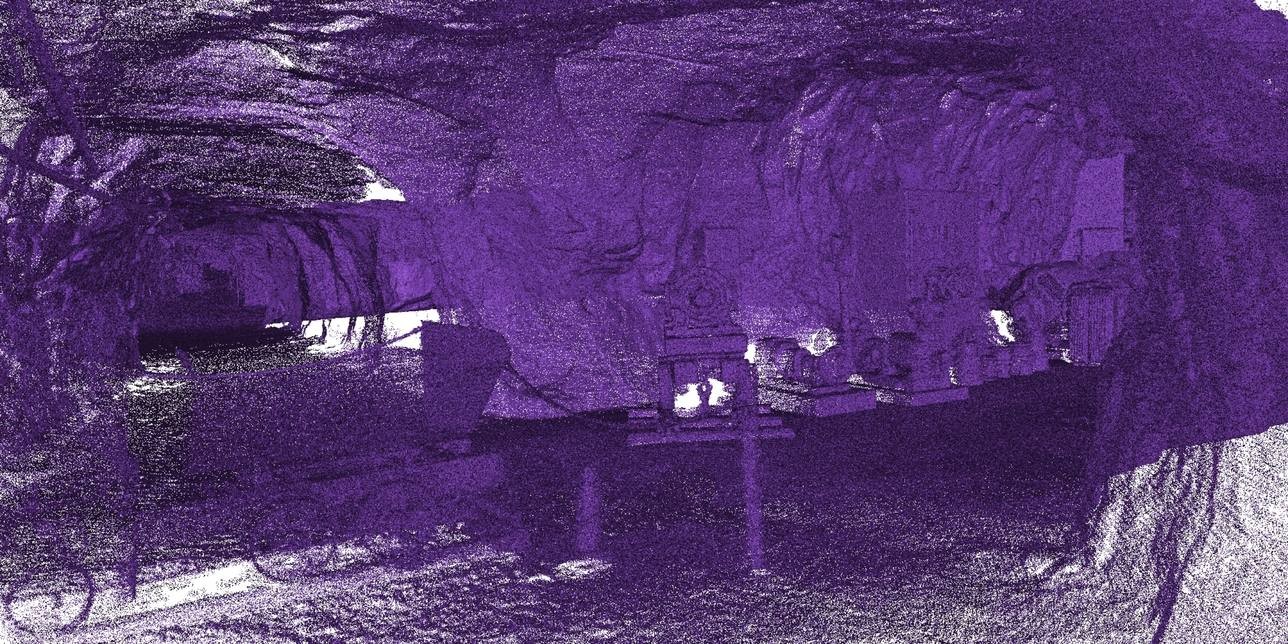
地下空间
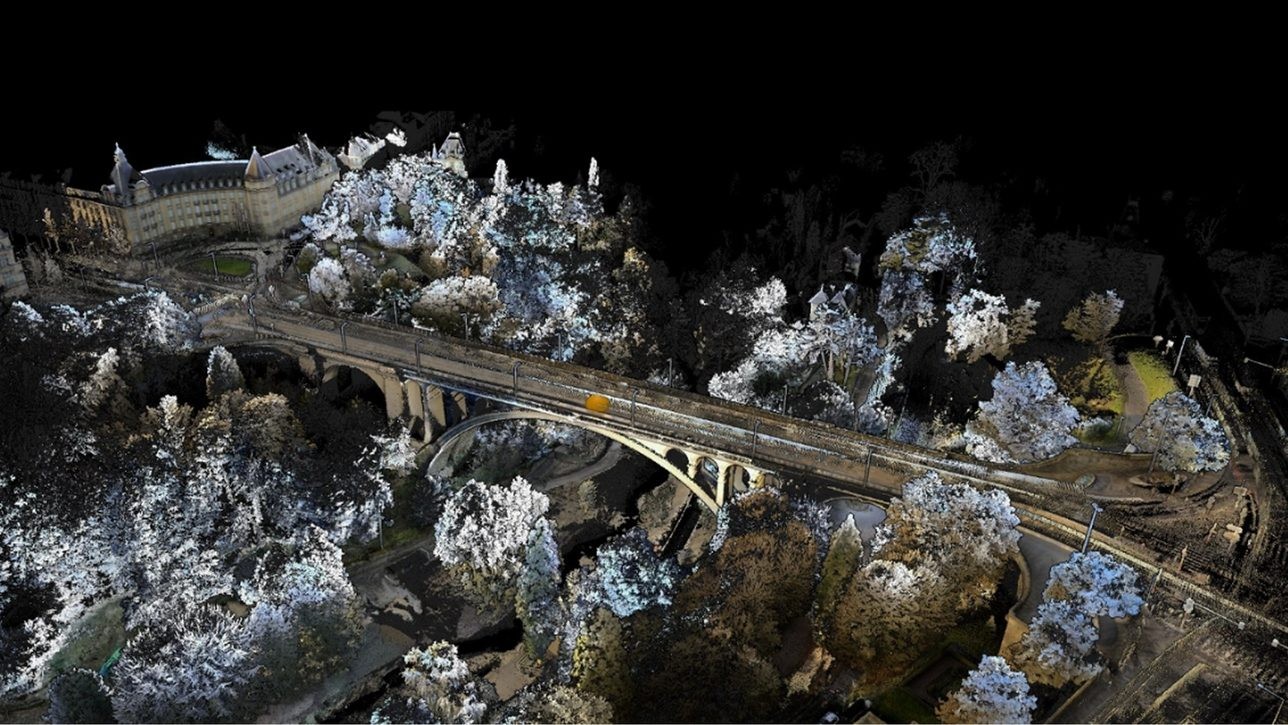
城市测绘
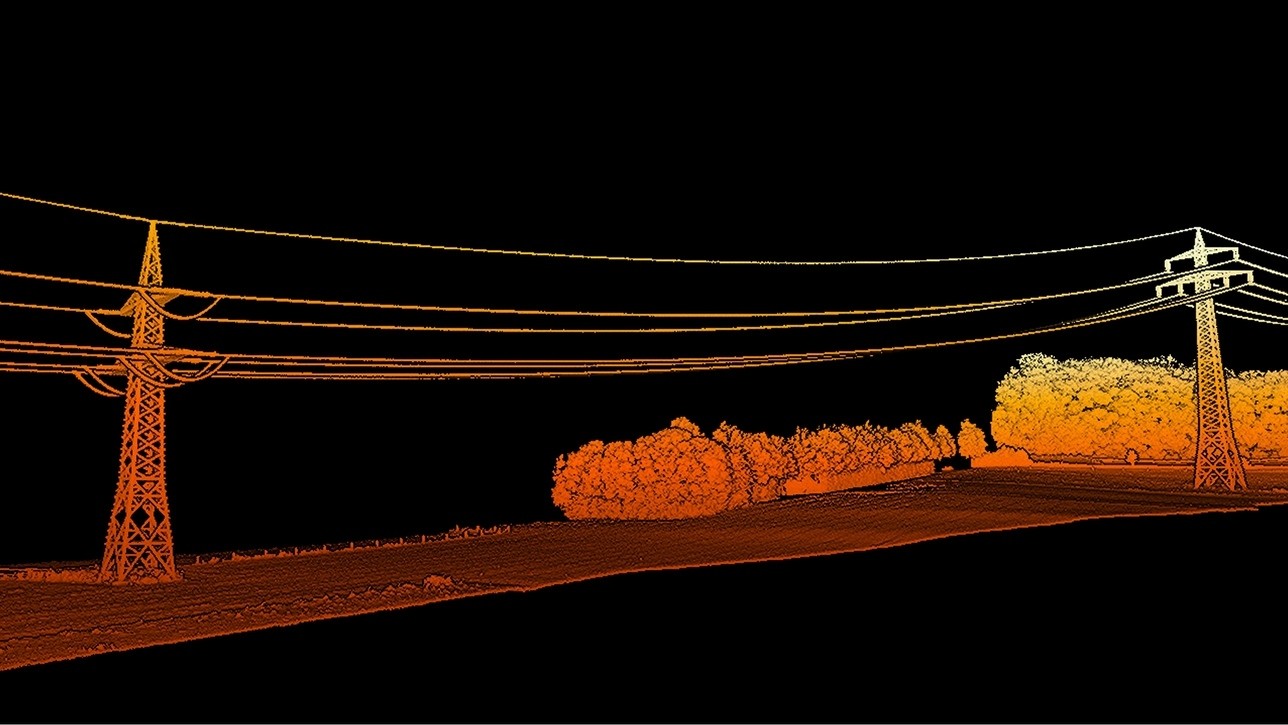
户外结构
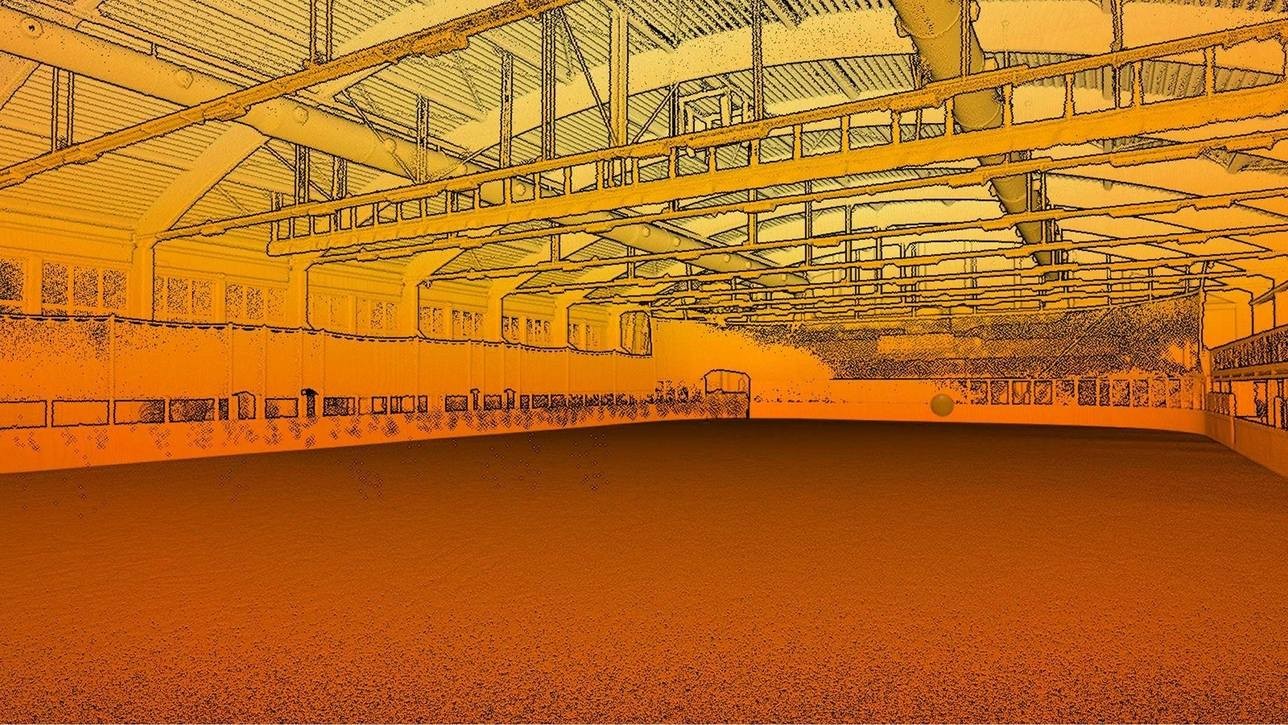
室内设施

工业空间
无论是大型机械、垂直竖井、工厂车间、露天场地,还是道路网络,Artec Jet都能适应项目的规模与复杂度。难以触达的区域或存在危险的环境,Artec Jet均可进入完成扫描;一台设备即可进入复杂环境,捕获关键资产数据。
IP65
防尘防水
防止碎屑与湿气侵入,确保扫描结果稳定可靠
运行温度
-10°C到45°C
专为严苛作业
环境打造
无需GPS定位
SLAM算法无需卫星即可实现定位。
无光环境运行
激光雷达的主动式激光传感不需要环境光。
每一次扫描都值得信赖
Artec Jet的各项功能、配件与先进软件协同作用,确保您首次即可准确完成任务。在提升生产力与效率的同时,不增加风险、成本或操作复杂度。

实时反馈
Artec Jet在扫描过程中可将实时点云预览传输至配套应用程序,即时确认所有数据均已采集完成,无需重新扫描。
360°场景捕获
凭借360° × 290°的扫描视野,
Artec Jet单次扫描即可捕获密集、
无阴影且覆盖全面的点云数据。
色彩捕获
将LiDAR数据与支持的相机所拍摄影像相结合,
生成色彩鲜明、逼真的3D模型,
特征清晰可辨。
GNSS辅助地理配准
借助RTK配件实现卫星定位,提升整体精度并减少对控制点的依赖。
即刻上手
即插即用设计,一键开启扫描;无需专业培训,即可开始捕获高质量数据。
现场验证
离开前在现场预览每次扫描结果,确保每次采集的数据完整可用。
一款扫描仪,七种部署方式
Artec Jet凭借强大的SLAM算法,在七种部署模式下均可提供可靠的扫描结果。您可根据当前项目需求选择相应模式,从容应对未来挑战。一台设备,一套工作流程,一次到位。
背包搭载
长时间测绘作业时解放双手。可搭配RTK或地面控制点(GCP)进行地上部分的地理配准,并在同一作业流程中进入GPS信号受限区域继续采集。

手持
边走边扫,轻松捕获任意空间数据。Jet仅重1.57kg,在建筑物、设施及狭小空间内携带轻便。

无人机搭载
作为空中测绘解决方案,可进入危险、高空或超视距区域。由AI驱动、自动提供避障与引导式探索,即便在完全黑暗的环境中亦可运行。

机器人搭载
可搭载于Boston Dynamics Spot等平台,进入密闭或危险空间进行测绘,避免人员暴露于风险环境中。

伸缩杆式
可触及吊顶内部、狭小空间及基础设施细部。伸缩杆可在不使用无人机的情况下延伸Artec Jet的作业范围,采集到难以扫描区域的密集点云数据。

笼架
可将这台基于SLAM技术的LiDAR扫描仪下放至垂直竖井、空隙及封闭空间。其不锈钢框架可抵御冲击,滑动顺畅,避免卡滞。
车载
以行驶速度捕获道路、隧道、大型设施及线性资产。集成RTK,可实现自动地理配准及长距离漂移校正。

超视距自主测绘
Artec Jet的AI自主引擎能让无人机深入GPS信号受限及其他难以进入的区域进行测绘,从而在保障人员安全的前提下拓展数据采集的边界。全程无需飞手操控,只需设定航点,无人机即可自主飞行并自动避开障碍物。

避障
全向LiDAR在无人机周围形成安全防护范围,即使在很狭窄的空间内也能探测到小至2毫米的线缆等障碍物。您的设备始终受到保护,数据采集持续畅通。
超视距飞行
借助路径规划与近距传感器,无人机能够自主飞行探索未知环境,并采集操作人员难以进入区域的数据。
自动返航安全机制
若电池电量不足或环境条件恶化,Artec Jet将沿安全的已测绘路径自动导航返回起飞点——设备不丢失,数据不遗漏。
从大场景到小部件,尽在同一生态系统
Artec Jet拓展了Artec 3D生态系统,使其轻松应对从大场景到小部件的扫描。通过无缝工作流程,实现对全局的精准把控与关键细节的高效呈现。
使用Artec Jet扫描区域
采集空间环境与场地布局数据
使用Artec Leo捕获细节
深入捕获精细几何结构及表面纹理

在Artec Twins中整合
合并数据集,以所需的比例与分辨率生成完整模型


Artec Twins:让数据为您所用
Artec Twins是一个专为大规模3D数据打造的处理与可视化平台,支持Artec Jet的完整工作流程,将采集到的原始点云转化为可供分析的结果。
1. 数据处理
将原始扫描数据转换为高精度点云。可根据应用环境使用优化的自定义配置文件批量处理多个扫描数据。
2. 地理配准
自动化工具可消除漂移点并对扫描数据进行地理配准——支持使用地面控制点、RTK数据或两者结合。功能包括自动标记点识别与坐标重投影。
3. 数据合并
基于SLAM的非刚性配准技术,将来自不同作业时段及部署模式的扫描数据合并为单一完整点云。
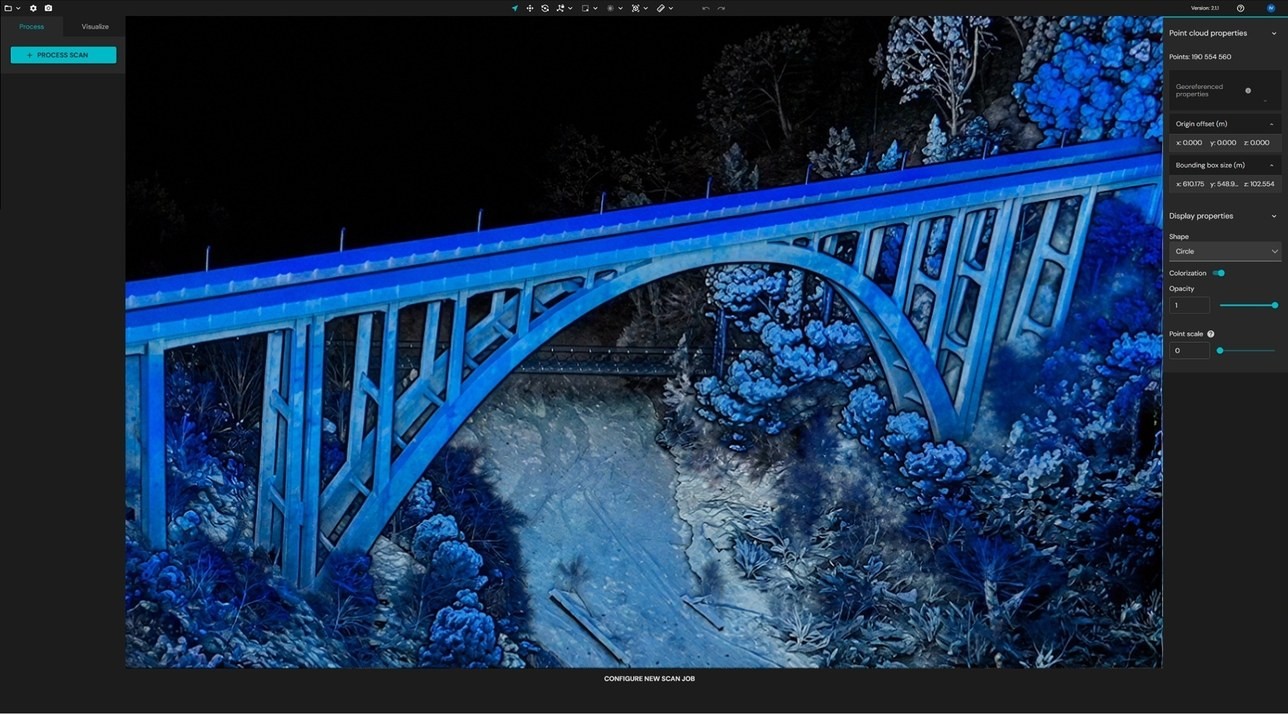
4. 可视化
360°着色、全景叠加、高程/强度/时间滤波及表面降噪。
5. 数据分析
变化检测、收敛监测、直接测量。支持的导出格式为 .LAS、.LAZ、.PLY、.DXF或 .E57。
应用行业
采矿
使用无人机对人员无法进入的危险采空区、竖井及巷道进行测绘。可通过车载方式扫描运输路线,或通过步行测绘矿井。
3D测绘 | 体积测量 | 变化检测 | 危险区域 | 数字孪生数据采集
AEC(建筑、工程与施工)
捕获建筑物、桥梁及基础设施的竣工文档。可将Jet安装在背包上前往现场采集数据,或可搭载无人机飞抵桥梁下方,亦可通过车载方式扫描获取道路网络数据。
竣工文档 | 3D测绘 | 质量检验 | 数字孪生 | 体积测量
国防与公共安全
在GPS信号受限环境中,使用自主无人机测绘隧道、建筑及地形,或利用地面机器人采集实时战术3D数据。
3D测绘 | 危险区域数据采集 | 现场文档记录 | 数字孪生
公共安全
使用无人机对灾难现场及建筑坍塌进行数字化记录,应急救援人员无需进入危险区域,得以保持安全距离。
现场文档记录 | 危险区域数据采集 | 3D测绘
民用基础设施
通过自主扫描追踪桥梁、隧道及大坝的结构状态,获取可重复、经地理配准的数据,为预防性维护提供依据。
状态评估 | 变化检测 | 竣工文档 | 3D测绘与检测
石油与天然气
扫描炼油厂、海上平台及管道。使用无人机测绘火炬塔及高空结构,无需搭建脚手架;支持管道腐蚀长期监测,掌握其变化趋势。
3D测绘 | 竣工文档 | 质量检验 | 变化检测 | 数字孪生 | 危险区域数据采集
工业厂房
使用无人机对人员无法进入的危险采空区、竖井及巷道进行测绘。可通过车载方式扫描运输路线,或通过步行测绘矿井。
应用
数字孪生
创建现场、设施及基础设施的高精度数字孪生,用于可视化、规划及持续管理。
竣工文档
精准记录各类建筑或场地的现状,为设计验证、翻修改造及合规性检查提供可靠的3D数据支撑。
变化检测与监测
比对不同时期的扫描数据以识别结构位移、形变、侵蚀或磨损,精度达±5mm。
质检与状态评估
远程评估资产、结构及基础设施状态,减少脚手架搭设、绳索作业及密闭空间进入的需求,降低安全风险。
体积测量
基于高精度3D点云数据,计算料堆体积、超挖/欠挖量、物料数量及回填需求。
地形测绘
利用可穿透植被的LiDAR技术来快速采集地形、地表特征及场地地貌的数据,告别数小时的传统野外作业方式。
进度监测
通过定期扫描追踪施工、挖掘或修复进度——将实际状况与设计方案及项目时间表进行比对。
设施管理
对既有设施进行数字化,用于维护规划、空间管理及设备追踪。无需人工测量,即可实现资产记录实时更新。
场地规划
扫描现场现状以支持施工前设计、虚拟布局及方案规划。踏勘次数更少,项目启动更快。
扫描生成 BIM 模型
弥合 BIM 与现实之间的差距。快速生成权威的 BIM 模型,支持 AEC 工作流程中的设计、改造和规划。









 语言选择
语言选择



 下载手册
下载手册
 请求报价
请求报价
 获取演示
获取演示








 浙公网安备33020502001216号
浙公网安备33020502001216号